Research
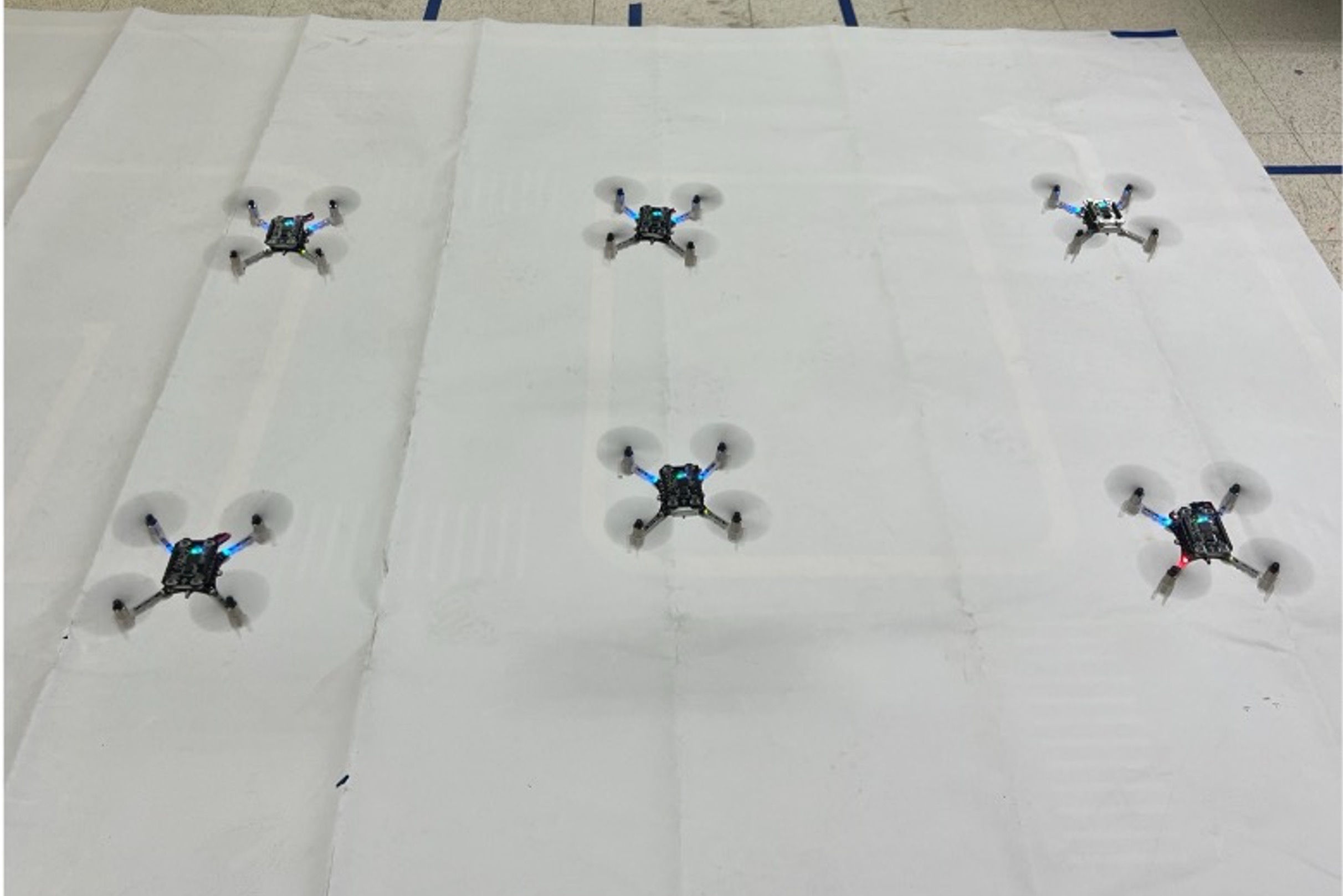
Our lab explores the foundations of robust, reliable, and scalable autonomy for robotic and multi-robot systems. We aim to build intelligent systems that can perceive, reason, and act in dynamic and unstructured environments, enabling applications in environmental monitoring, precision agriculture, disaster response, urban mobility, and beyond. We are particularly interested in how coordination, perception, planning, and control can be enhanced by combining algorithmic tools with data-driven approaches, including emerging foundation models. This includes investigating how robot teams can operate effectively under limited communication, uncertainty, and evolving tasks, while generalizing across diverse environments and missions.
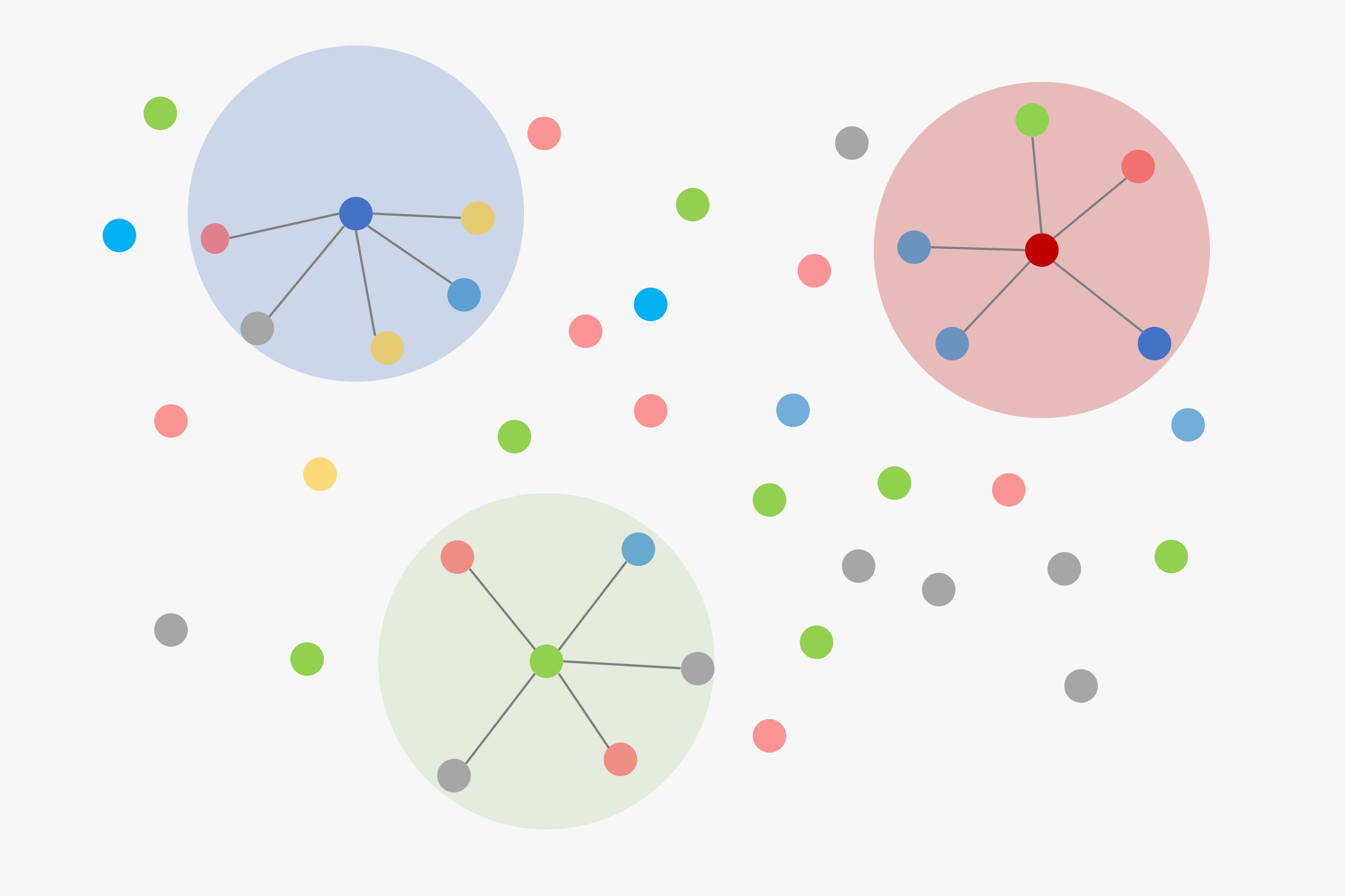
Preprint: A survey of large language models (LLMs) for multi-robot coordination.
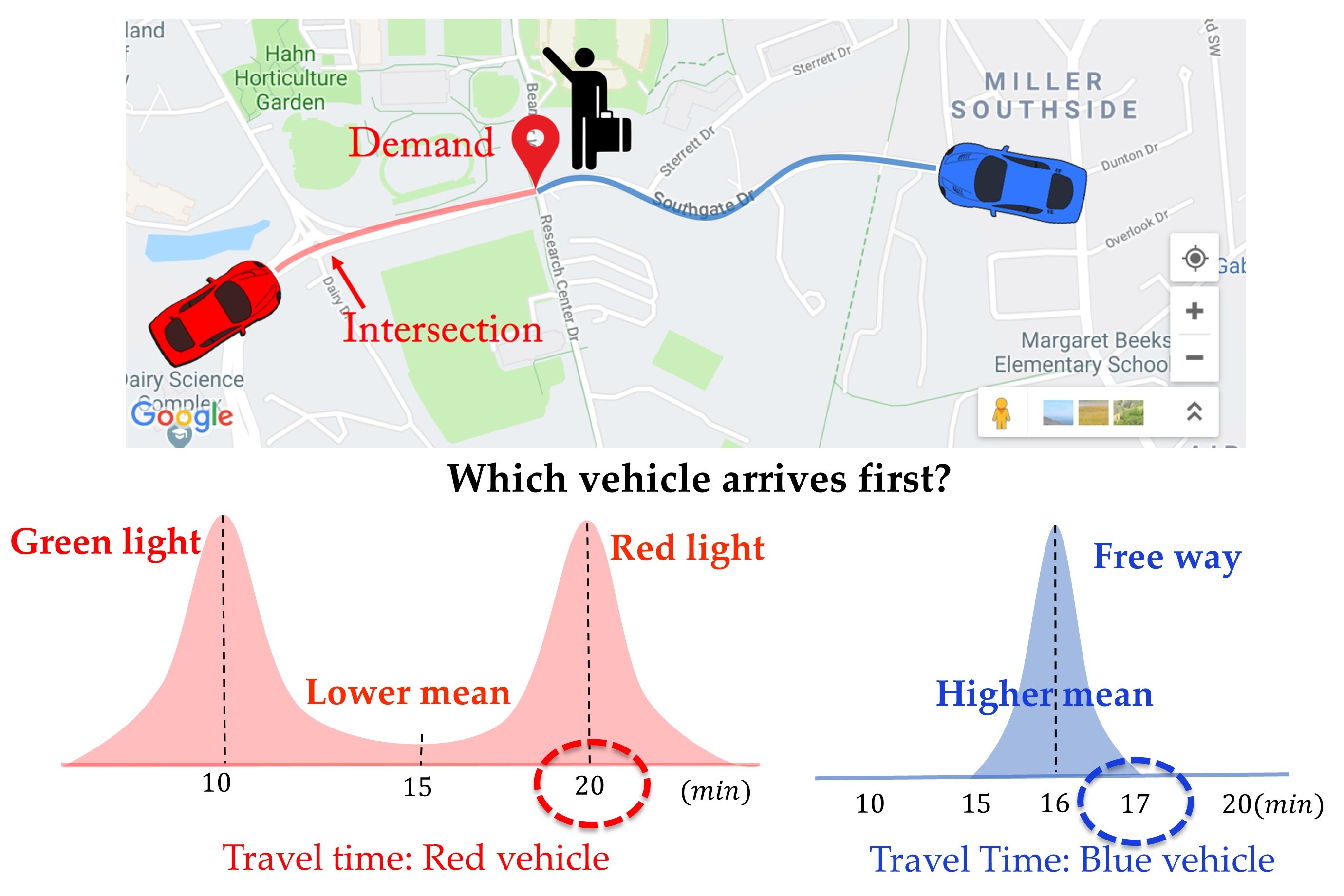
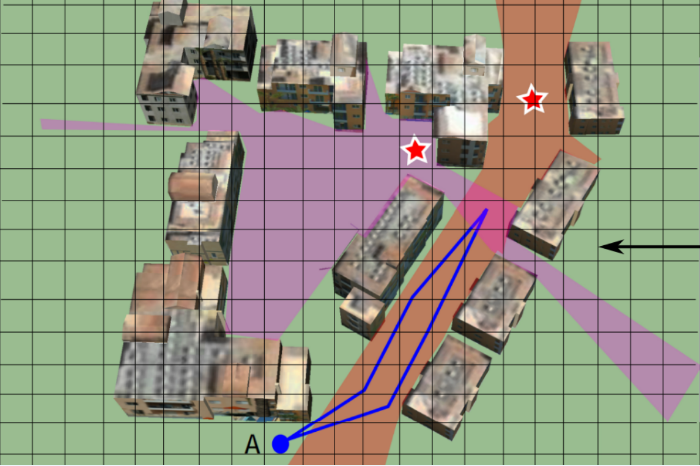
Current Robotics Reports: A survery of multi-robot coordination and planning in uncertain and adversarial environments.